Getting started¶
Booting up the robot¶
In the kindyn package a couple of example robots can be found. You can run them with the provided robot.launch file:
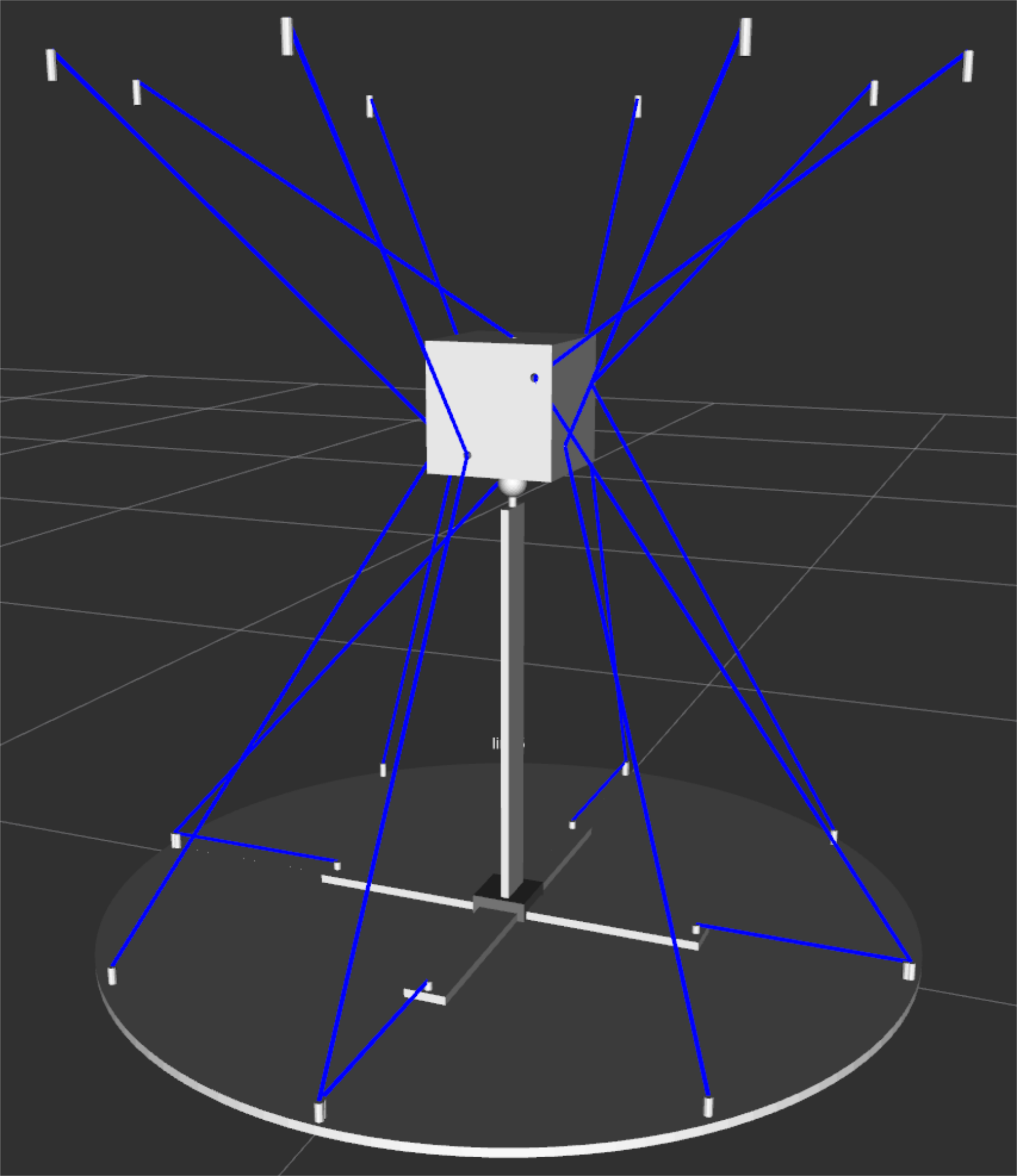
msj_platform¶
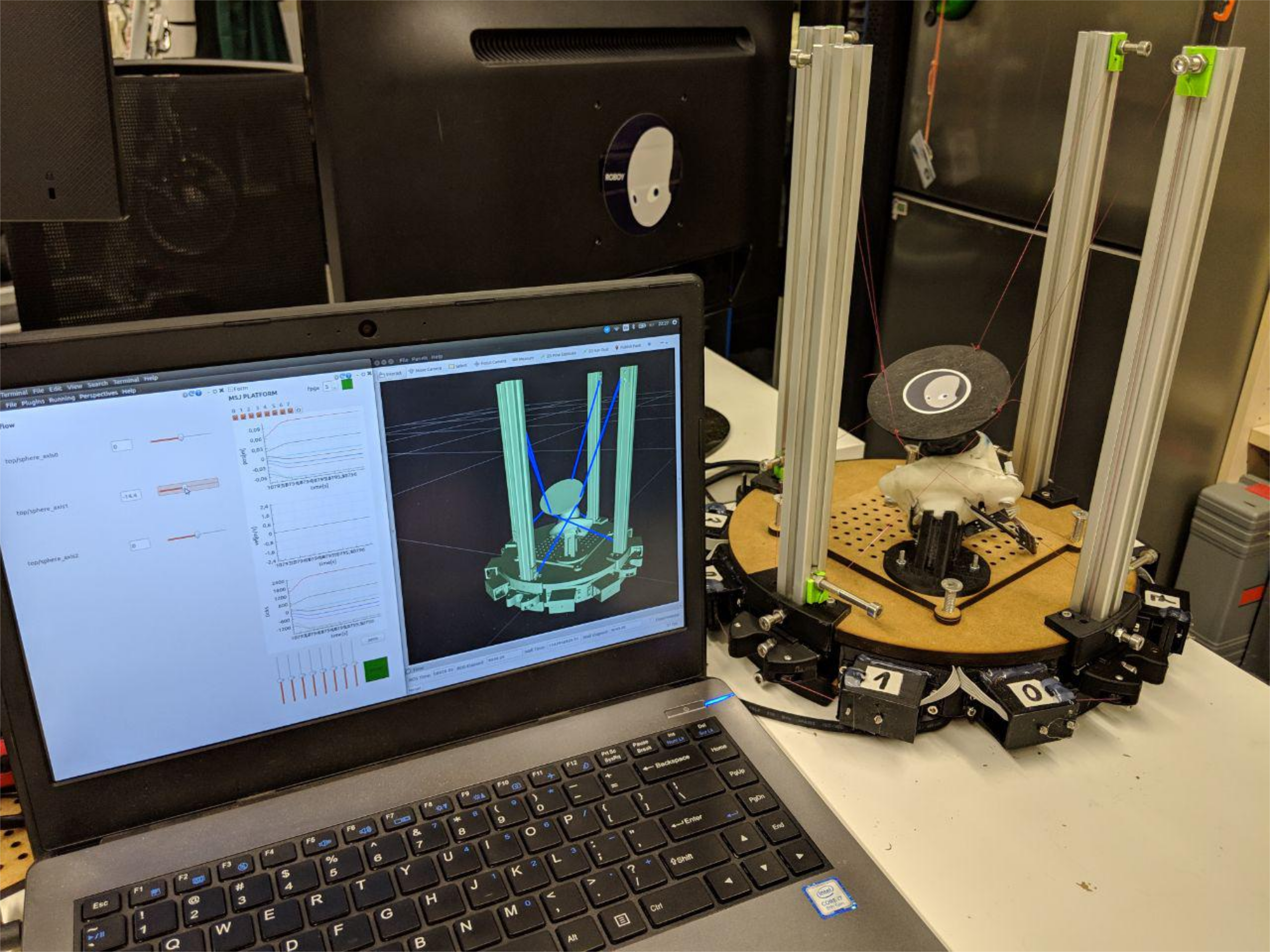
A robot that was build for training one of the 3-DoF shoulders of Roboy 2.0. It uses 8 cables to control the 3-DoFs. You can run it with the following command:
roslaunch kindyn robot.launch robot_name:=msj_platform start_controllers:='sphere_axis0 sphere_axis1 sphere_axis2'
roboy_upper_body¶
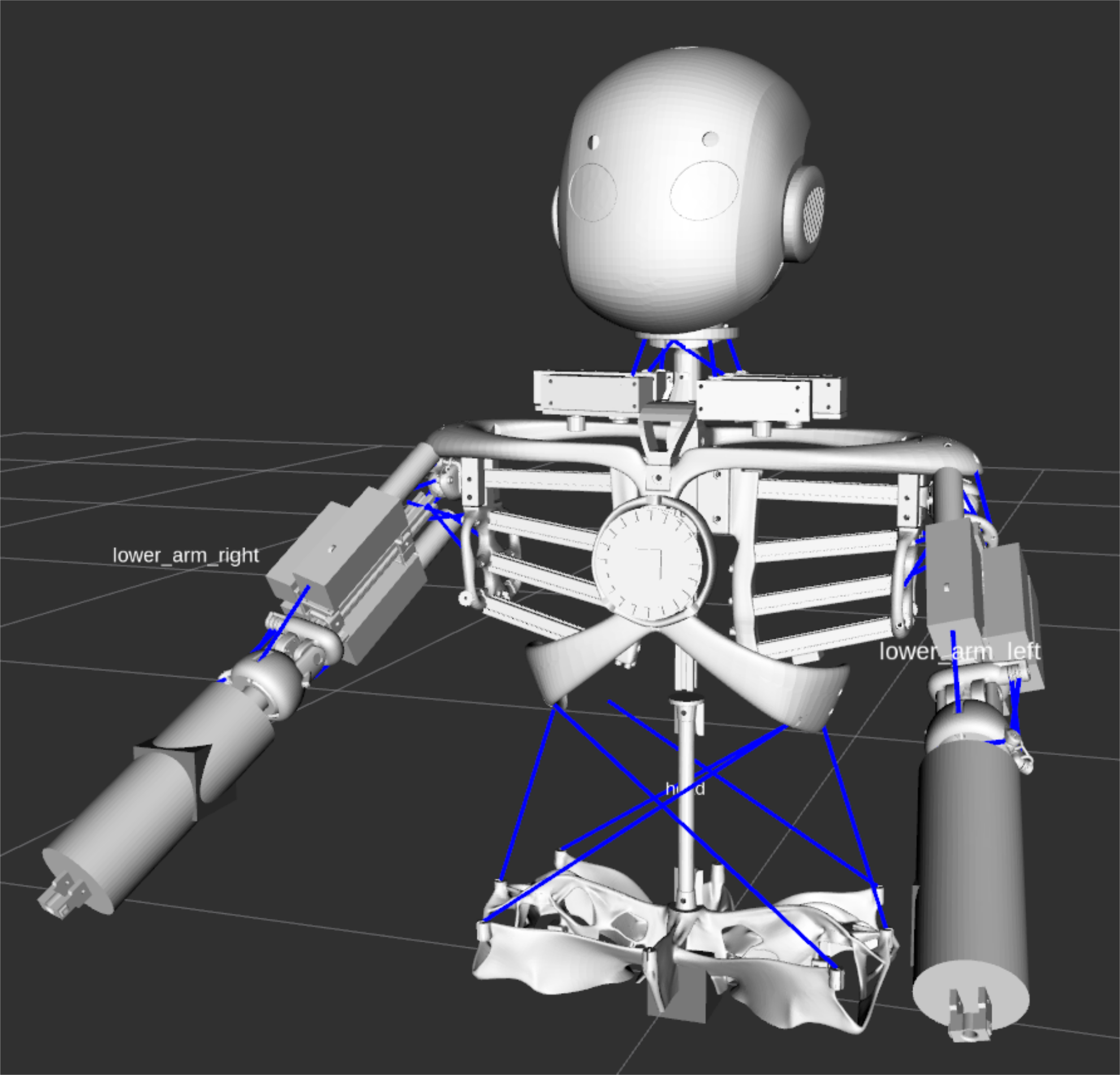
Roboy 2.0 upper body with the 3-DoF head and his two 5-DoF arms. Use the following command to launch it:
roslaunch kindyn robot.launch robot_name:=roboy_upper_body start_controllers:='spine_v0_axis0 spine_v0_axis1
spine_v0_axis2 spine_v1_axis0 spine_v1_axis1 spine_v1_axis2 spine_v2_axis0 spine_v2_axis1 spine_v2_axis2
sphere_head_axis0 sphere_head_axis1 sphere_head_axis2 sphere_left_axis0 sphere_left_axis1
sphere_left_axis2 elbow_left_rot0 elbow_left_rot1 sphere_right_axis0 sphere_right_axis1 sphere_right_axis2
elbow_right_rot0 elbow_right_rot1'
roboy_xylophone¶
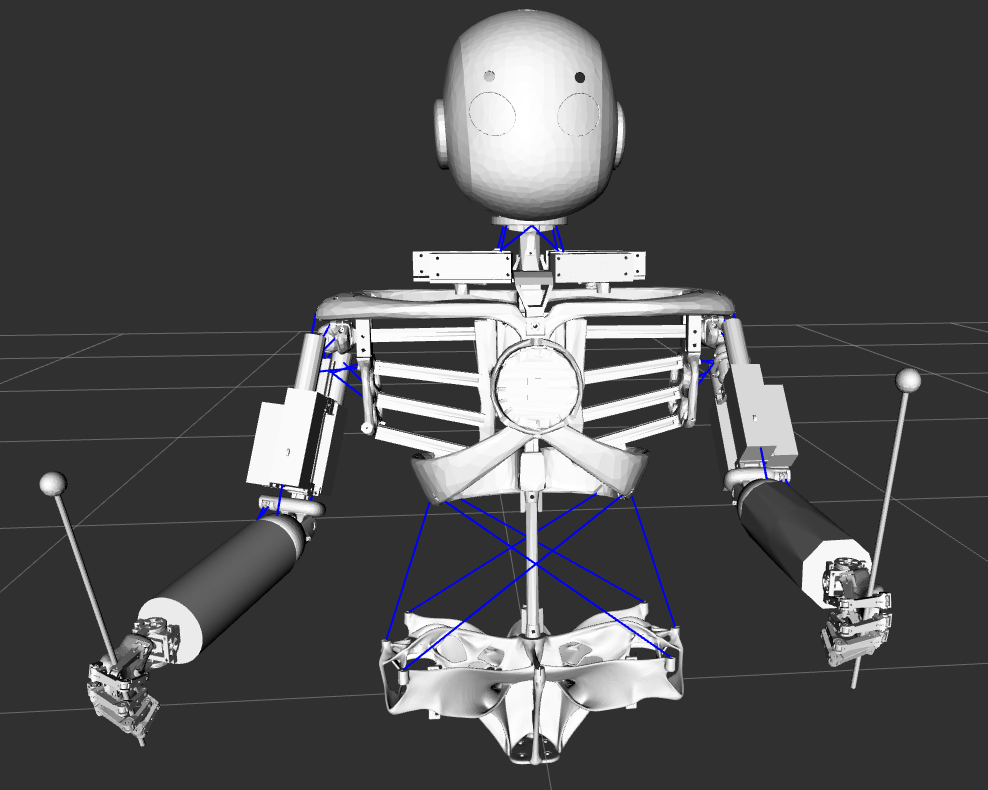
Roboy 2.0 upper body with the 3-DoF head and his two 7-DoF arms holding xylophone playing sticks. Use the following command to launch it:
roslaunch kindyn robot.launch robot_name:=roboy_xylophone start_controllers:='sphere_head_axis0 sphere_head_axis1
sphere_head_axis2 sphere_left_axis0 sphere_left_axis1 sphere_left_axis2 elbow_left_rot0 elbow_left_rot1
sphere_right_axis0 sphere_right_axis1 sphere_right_axis2 elbow_right_rot0 elbow_right_rot1 left_wrist_0
left_wrist_1 right_wrist_0 right_wrist_1 hip_joint left_stick_tip_joint right_stick_tip_joint'
roboy_arcade_maschine¶
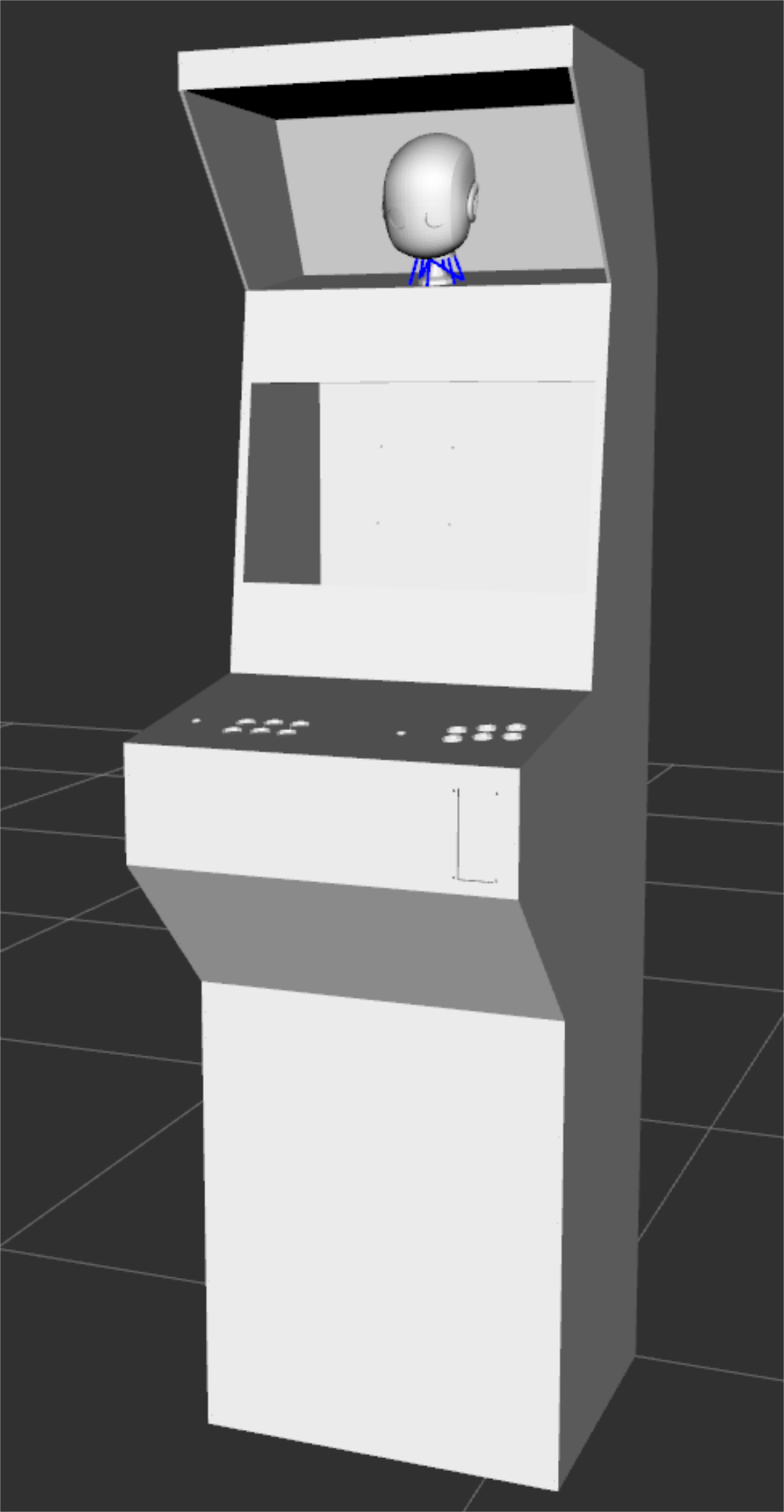
A retro arcad maschine in the Roboy lab that has a 3-DoF Roboy head mounted on the top. Launch it with:
roslaunch kindyn robot.launch robot_name:=roboy_arcade_maschine start_controllers:='sphere_axis0 sphere_axis1 sphere_axis2'
test_robot¶
A robot with 6-DoF, 3 prismatic and 3 rotational, with 20 cables. You can launch it with the following command
roslaunch kindyn robot.launch robot_name:=test_robot start_controllers:='joint0 joint1 joint2 sphere_axis0 sphere_axis1 sphere_axis2'
yatr¶
Yet another test robot, 3-DoF, 8 cables. You can launch it with the following command
roslaunch kindyn robot.launch robot_name:=yatr start_controllers:='joint0 joint1 joint2'