Working with CASPR¶
CARDSflow supports visualization of robots in CASPR (The Cable-robot Analysis and Simulation Platform for Research), an open-source software platform developed in MATLAB for the analysis of arbitrary cable-robot models.
You need to install custom message support for matlab MATLABROS
Setting up CASPR¶
Follow the installation guide in CASPR
After having CASPR installed in MATLAB, note the IPs of your platforms running CARDSflow and CASPR
Set up the CARDSflow interface in CASPR by: (replace <cardsflow_ip>, <caspr_ip> with the corresponding IPs)
CARDSFlow_configuration.SetROSConfig('<cardsflow_ip>', '<caspr_ip>');
Build custom ROS messages in roboy_communication for MATLAB by following instructions here
Simple Visualization¶
Launching CARDSflow¶
Launch a simple visualizer in CARDSflow by:
roslaunch cardsflow_rviz simple_visualization.launch
Add the CARDSflow panel in RViz
At the Displays Sidebar set Globals Options > Fixed Frame to “world”
At the Displays Sidebar add the display types “rviz > Marker” and “rviz > TF”
File > Save Config
CASPR Simulations¶
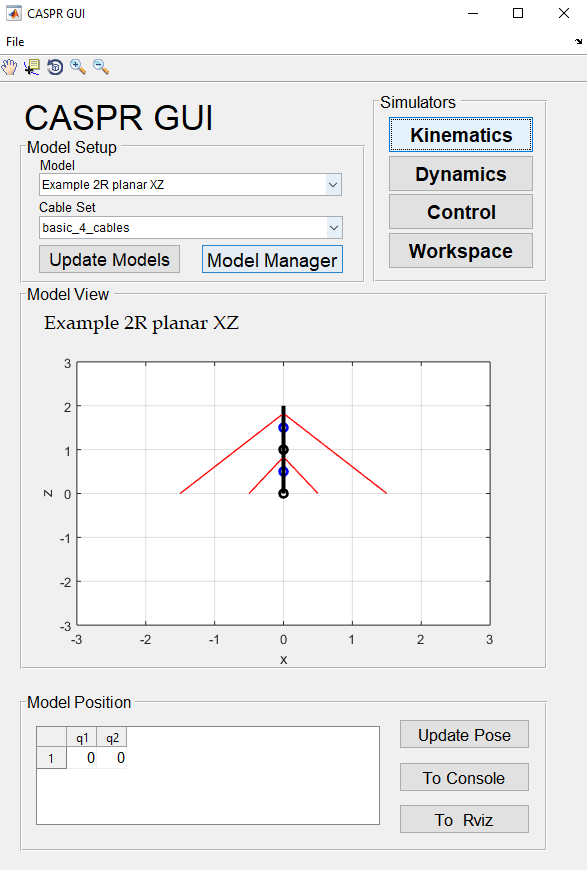
Launch the GUI in CASPR by:
CASPR_GUISelect
Example 2R planar XZfrom theModelpull down menuPress the
To Rvizbutton on the GUI and verify that the robot is visualized in RViz
Press the
Kinematicsbutton inSimulatorsRun an inverse kinematics simulation by pressing the
Runbutton
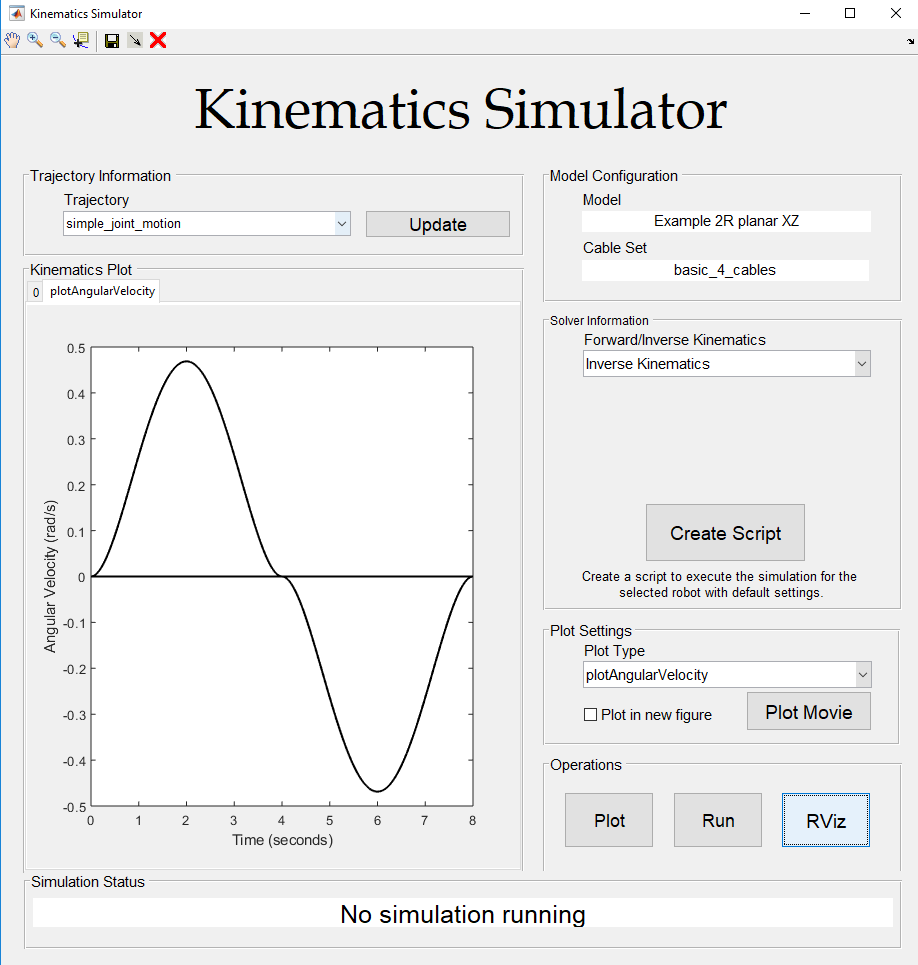
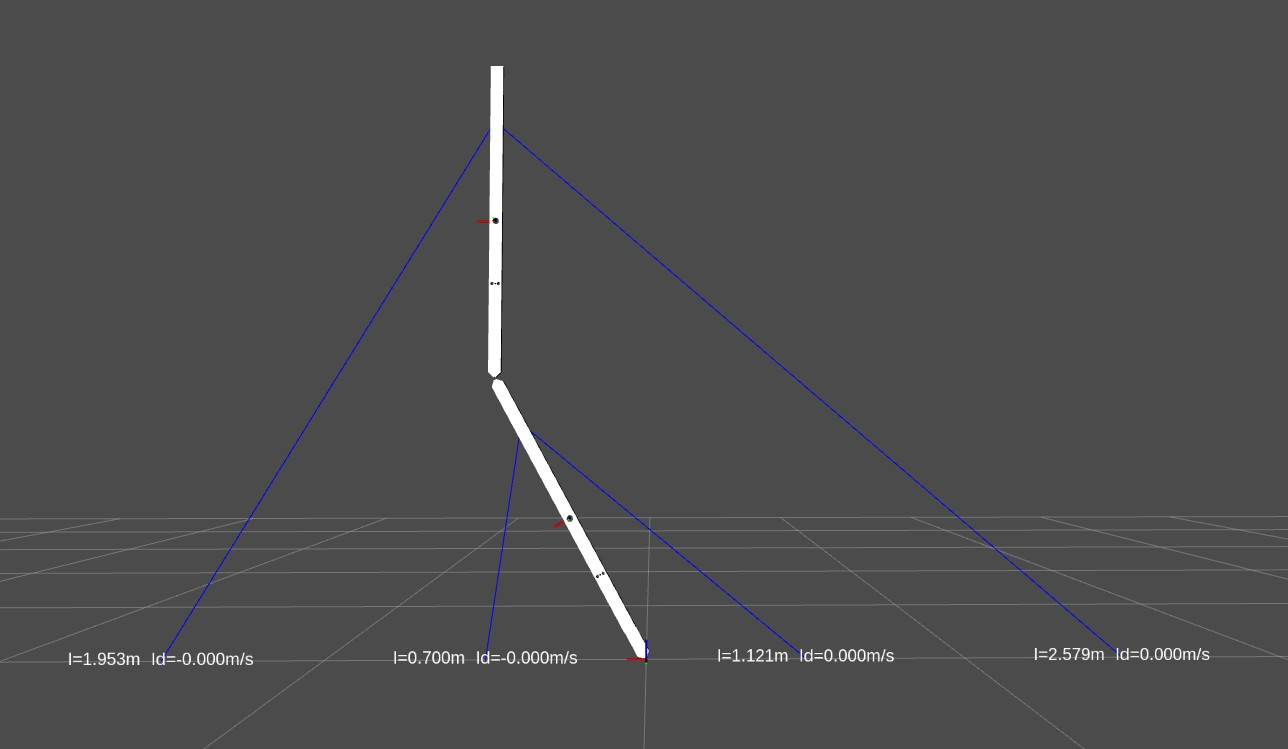
Press the
RVizbutton to visualize the trajectory